Robotic Arm
Robotic Arm with 5 degrees of freedom, powered by servo motors.

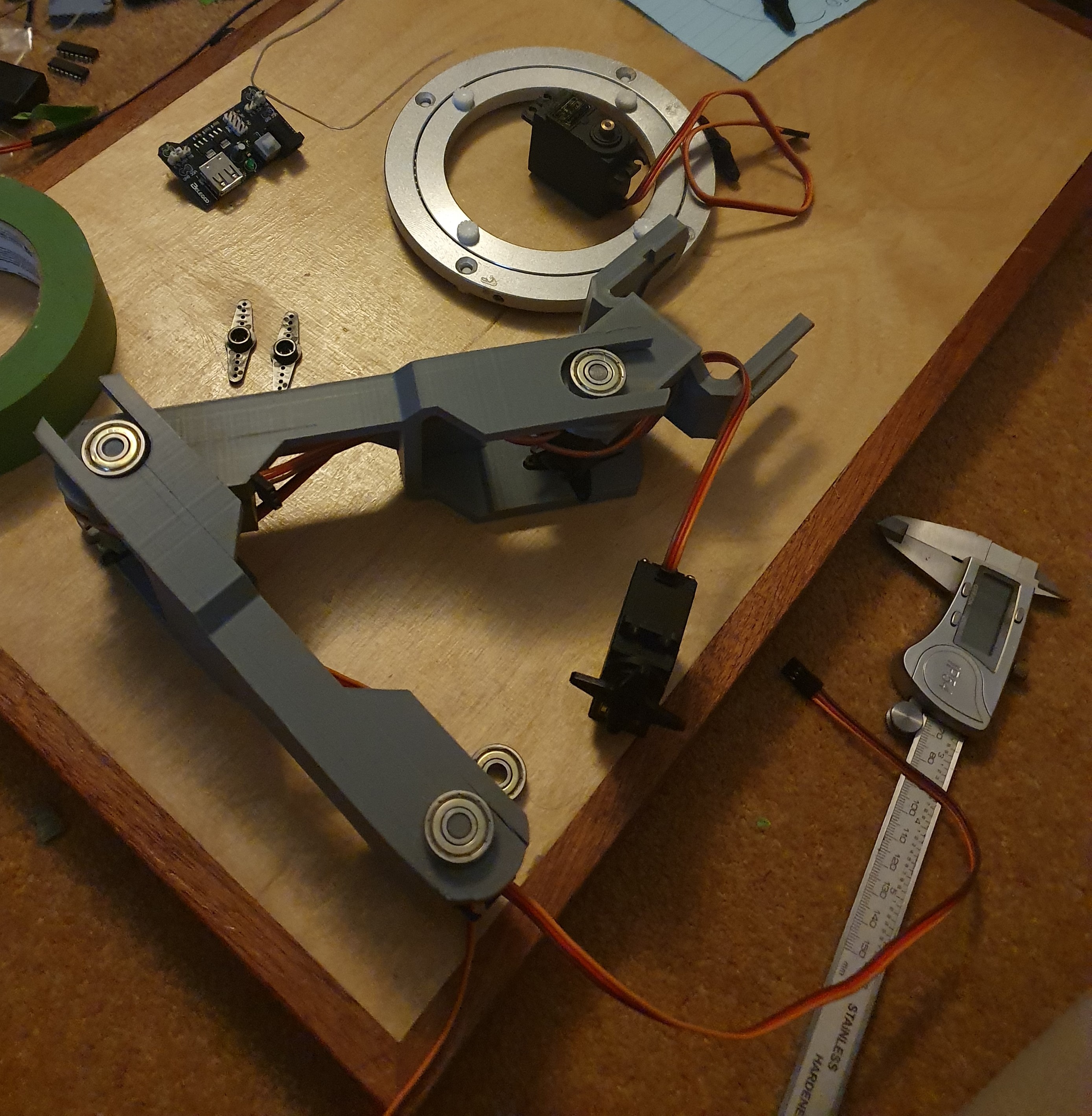
This is a 3D printed robotic arm that I designed and built. It is controlled by an Arduino and can be programmed to move to any position in 3D space. The arm is made up of 5 links, each with a servo motor attached to it. The servo motors are controlled by an Arduino Uno and the code is written in C++. The arm can be programmed to move to any position in 3D space by inputting the desired x, y, and z coordinates. The angle of approach of the arm can also be specified, which is the angle between the end effector and the x-axis.

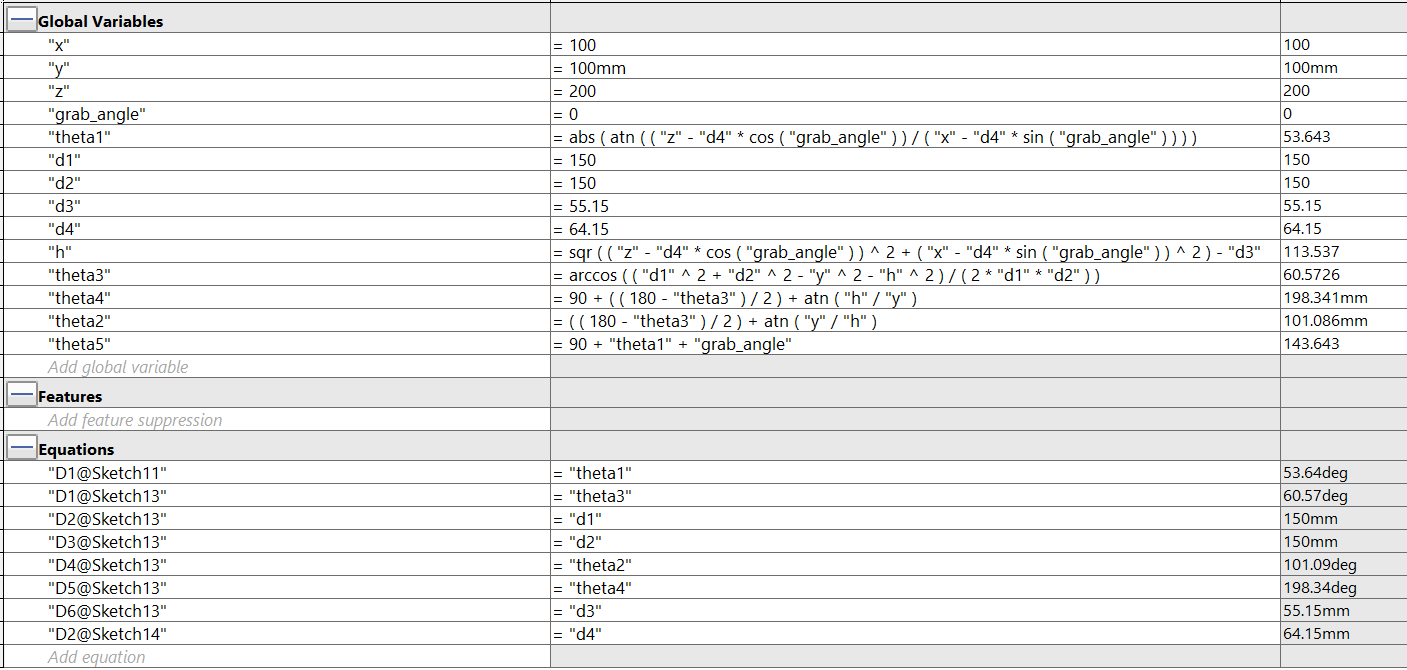
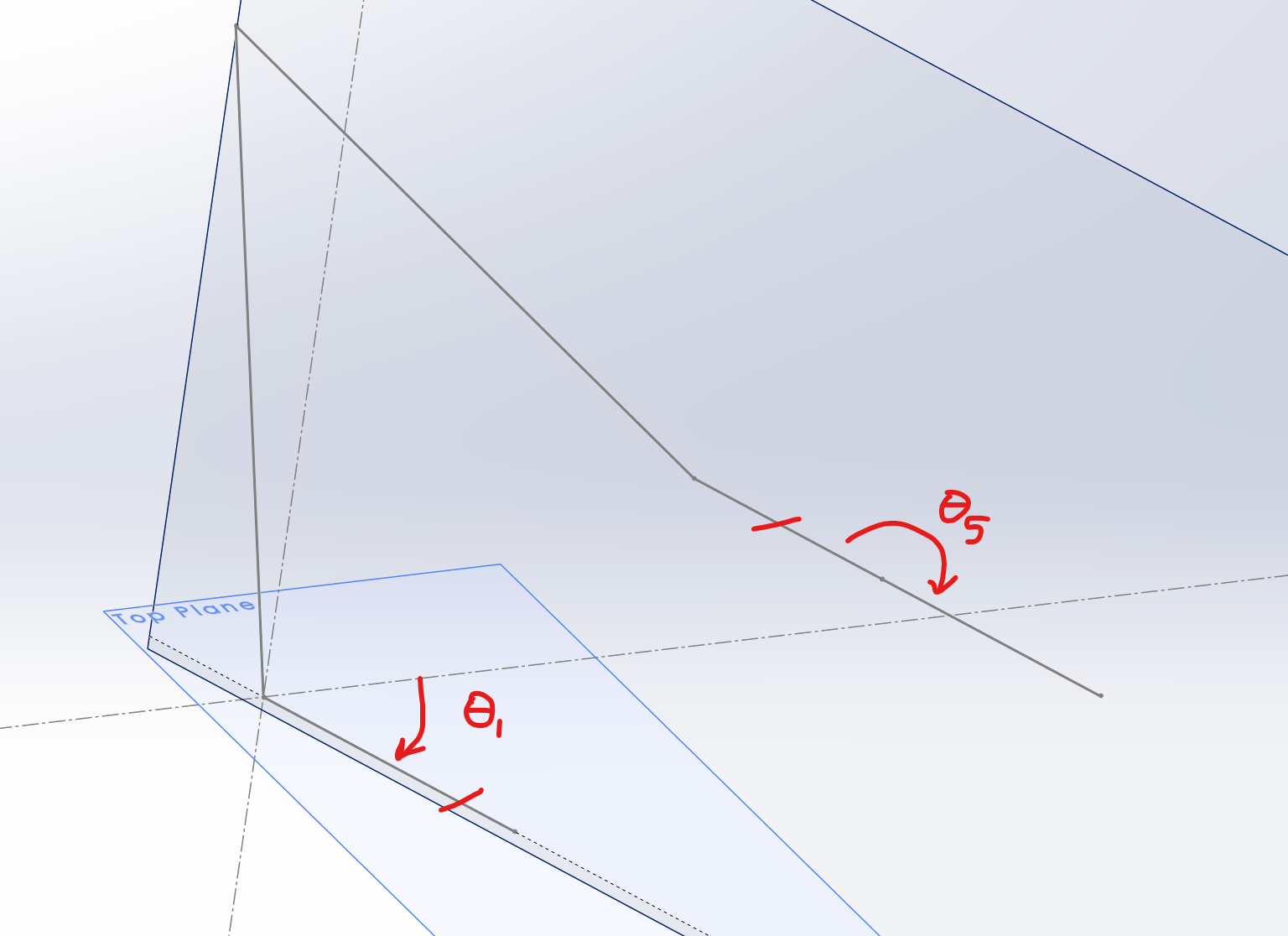
The inverse kinematic equations were solved for by hand using geometry and were programmed into an Arduino to control the robot. Here they are shown in the SOLIDWORKS equation editor:
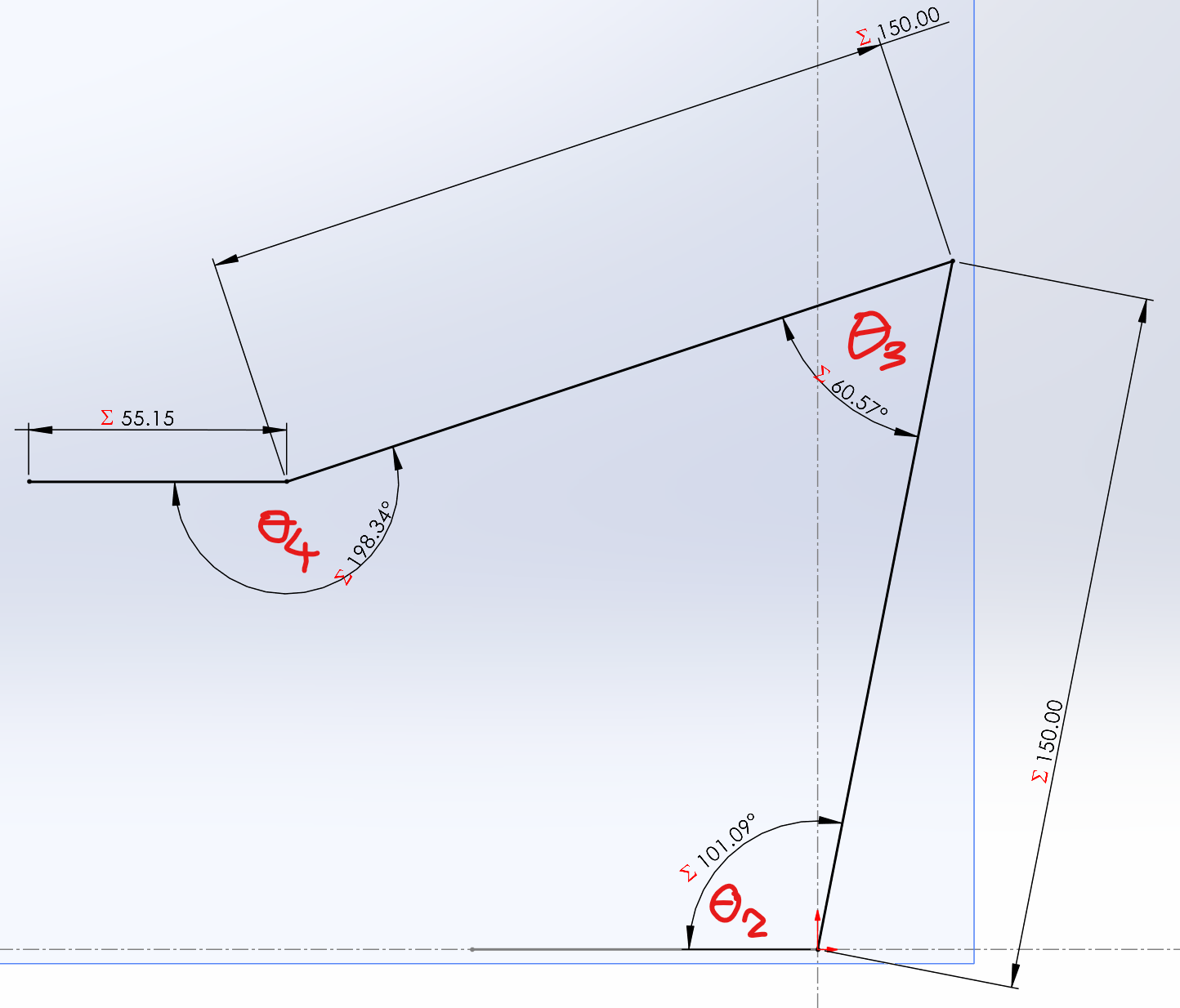
Here the the labelled angles on the sketch
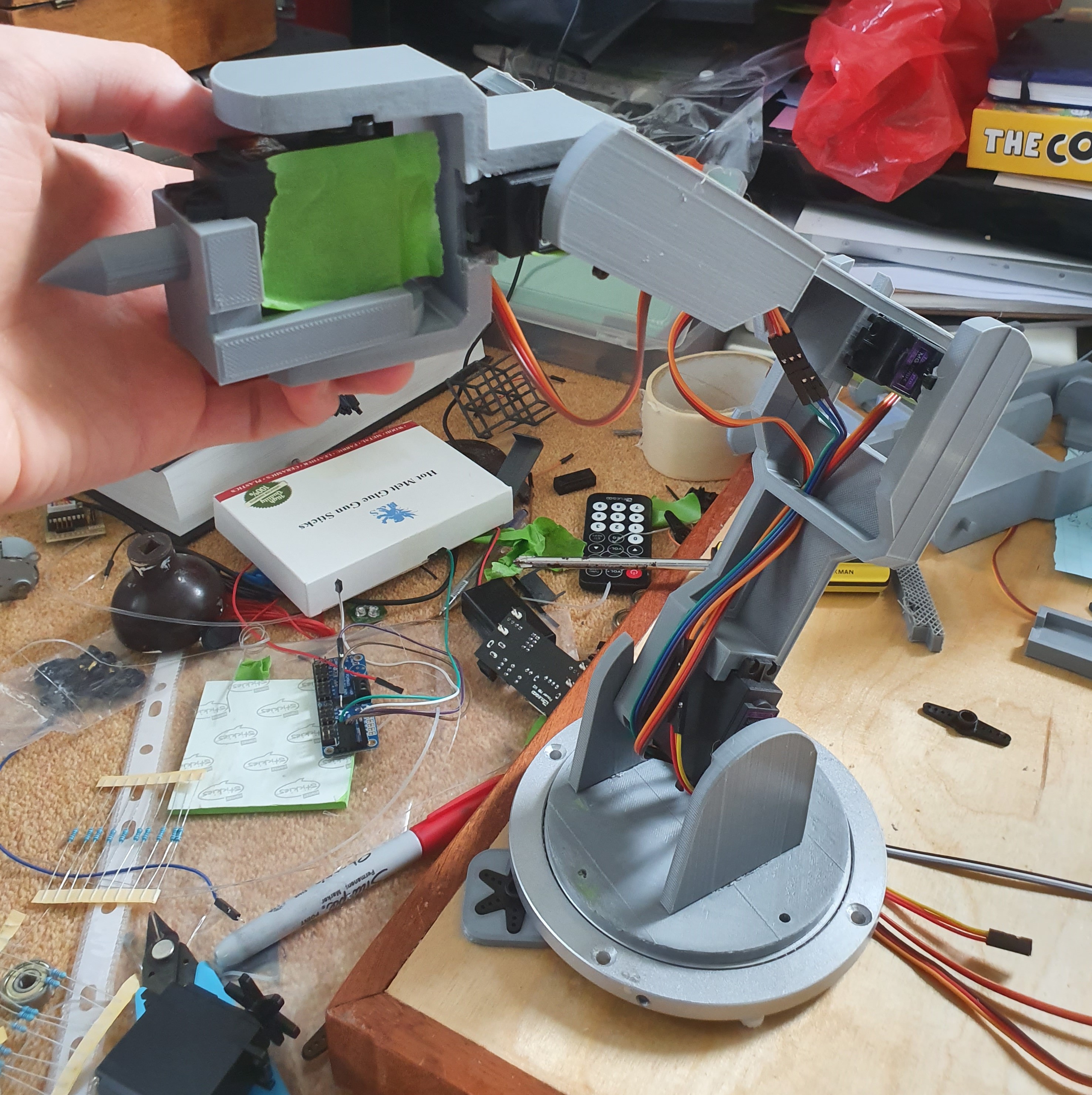
The base servo isnt strong enough to move the arm so I helped by giving it a bit of support, otherwise the arm can sag below its target position and stall the servo. Videos of the arm in action:
If I were to re-visit the project I would use more accurate and higher torque stepper motors, however I did not know about them at the time, nor did I have the budget to buy them.