In progress drive system
A slow project to iterate a low cost FOC cycloidal drive system.
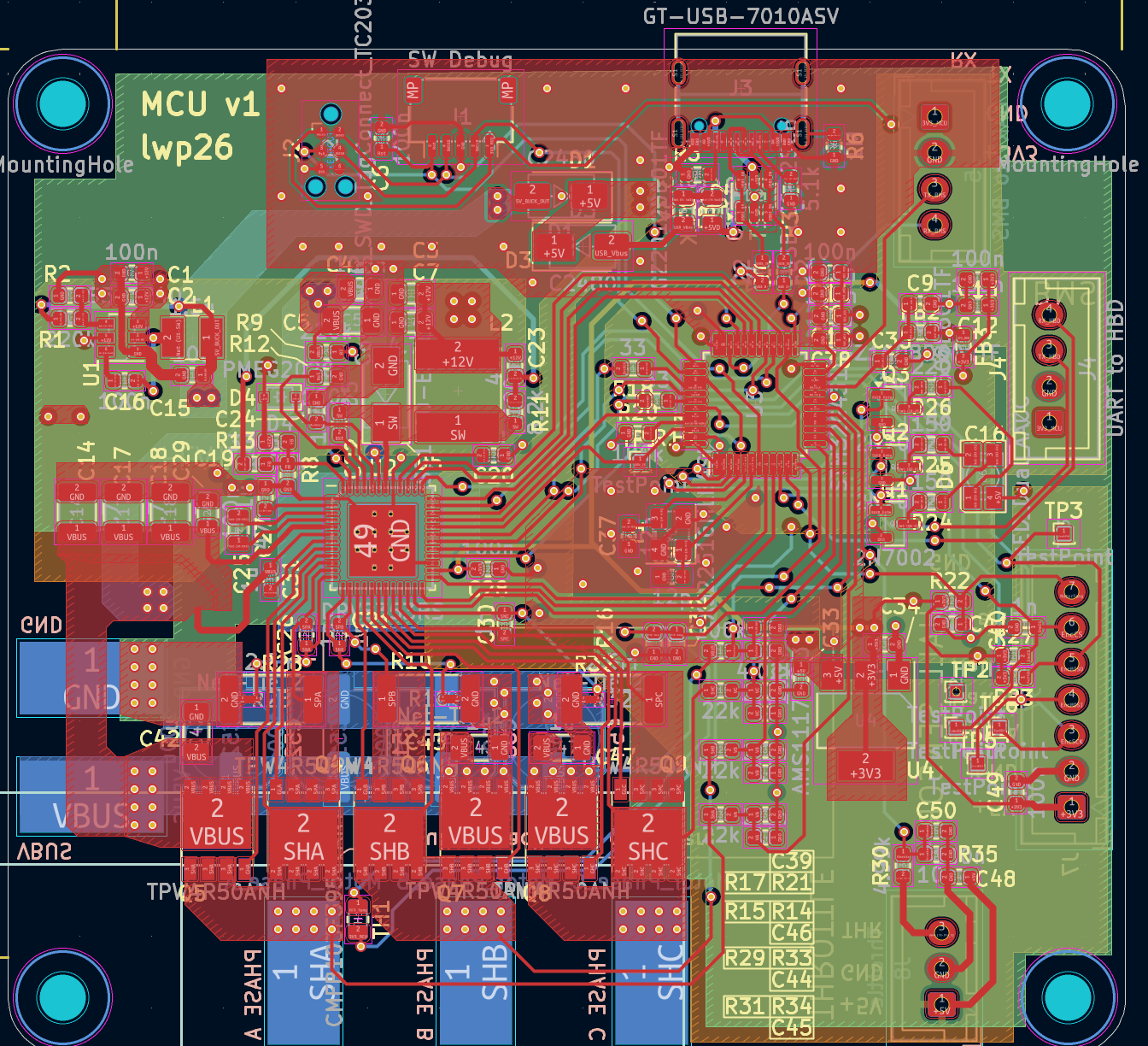
The schematic and DRV8353 driver layout for the very first layout is taken from the Open Source Motor Controller. Modifications to the oscillator, swapping of micro usb to usb-c and changing the encoder to SPI were made to improve the design and lower the cost.
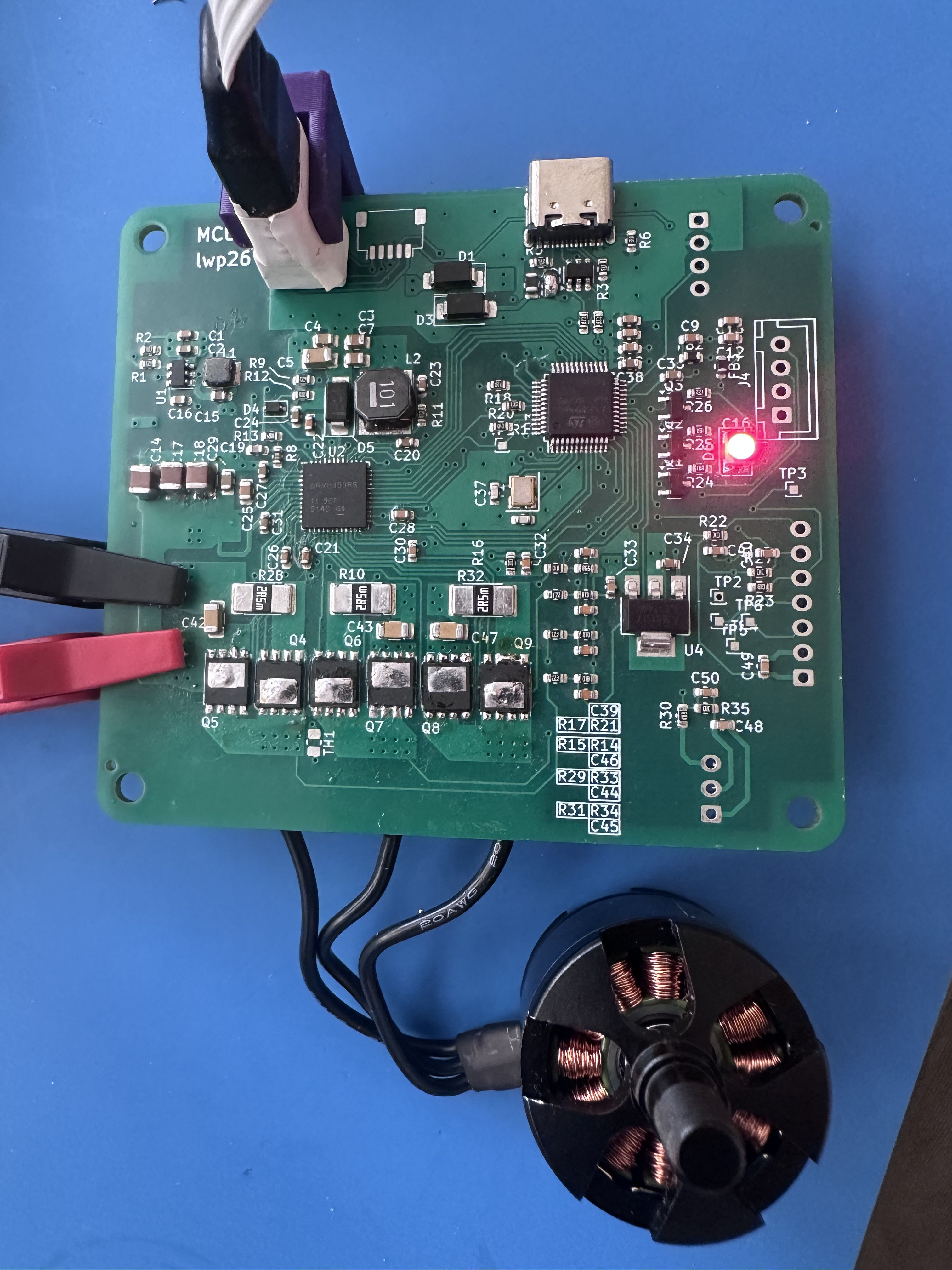
The first board prototype has been made and is currently being tested. To save money only small passive components were placed in PCB assembly. Hand soldering of the STM32 LQFP package went ok but proved difficult for the DRV8353 which has a smaller QFN package. Large inductors and capacitors were also a lot cheaper to buy separately but were easy to solder on.
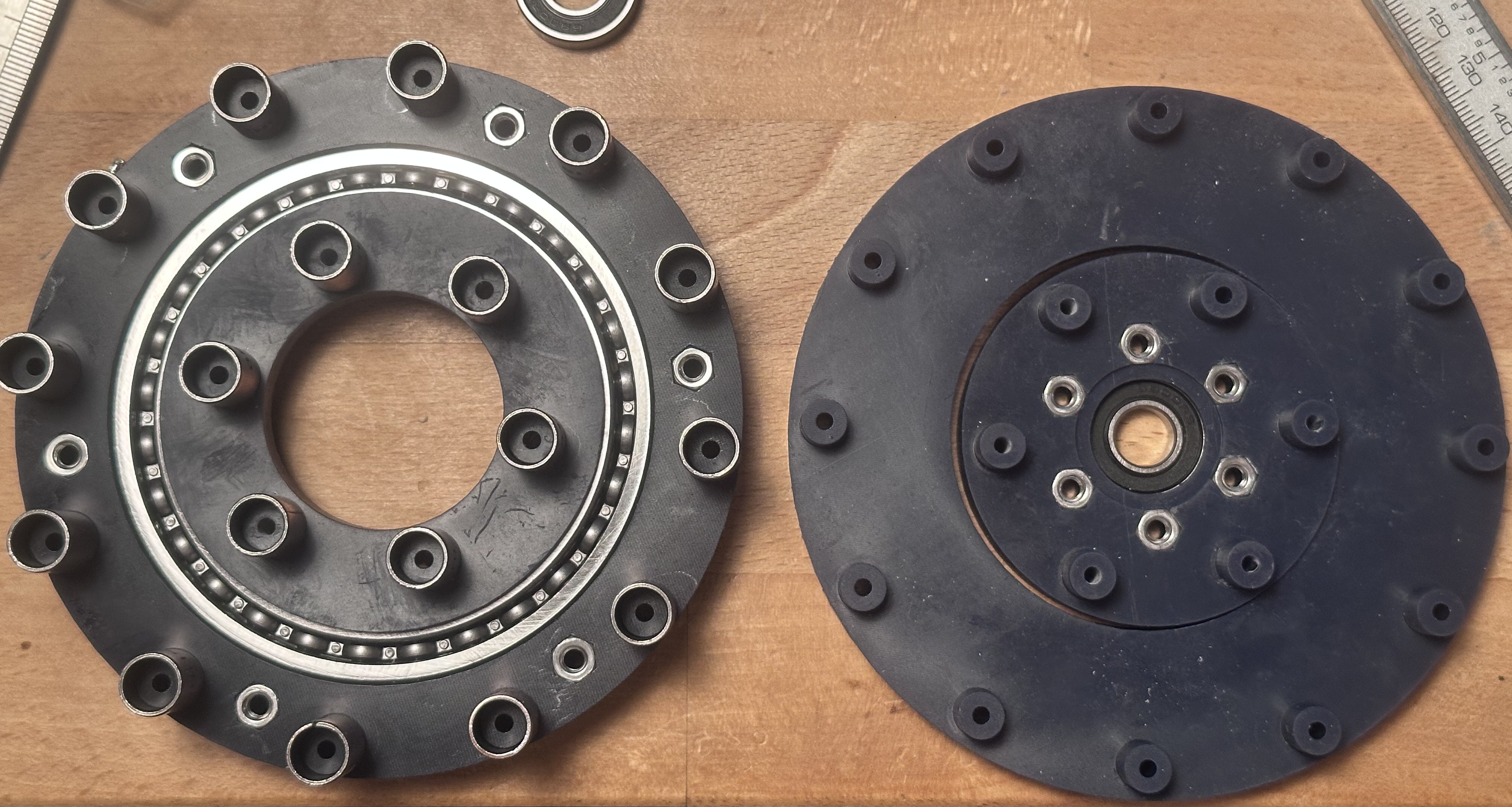
A cycloidal gearbox has been designed 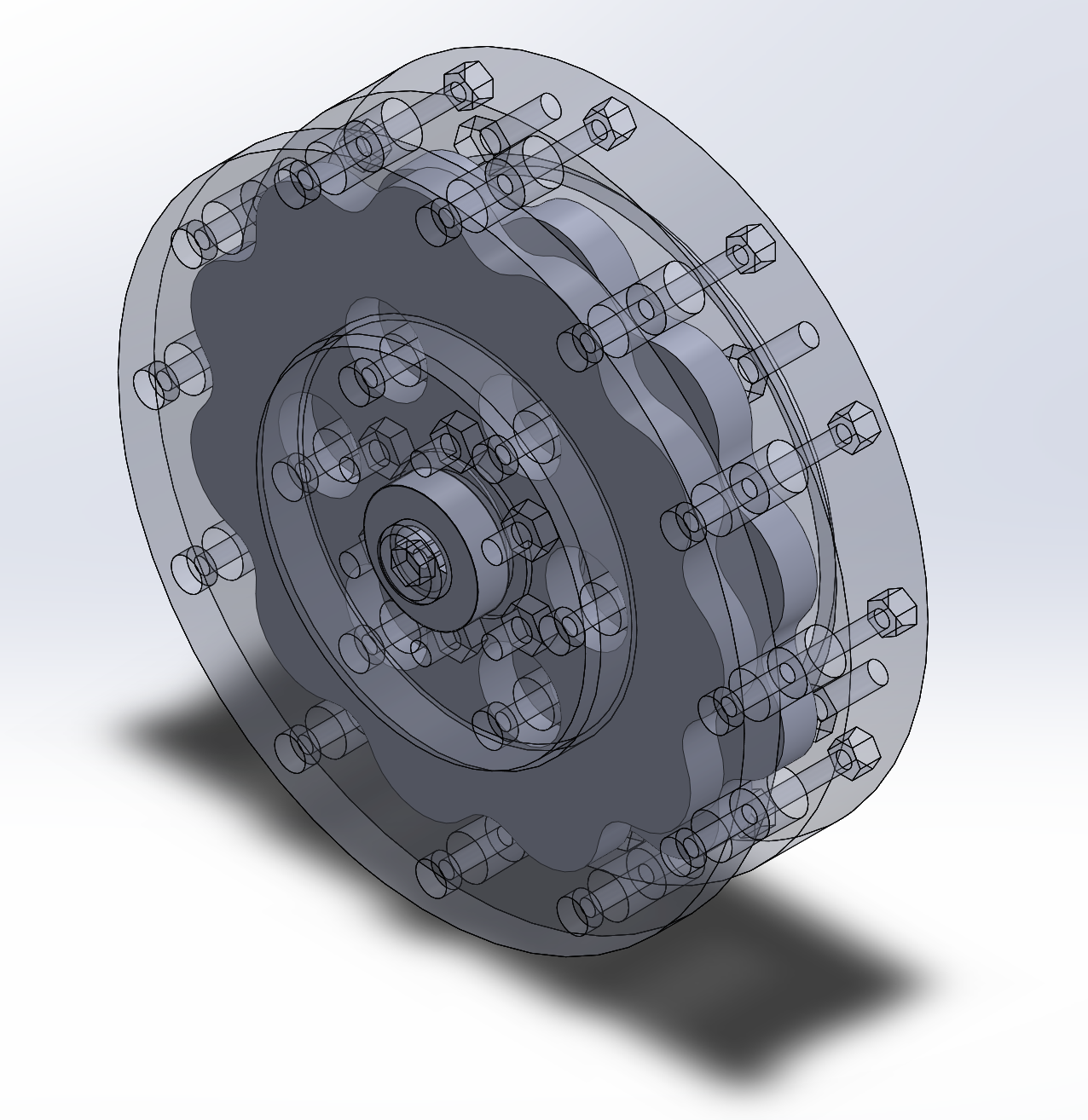
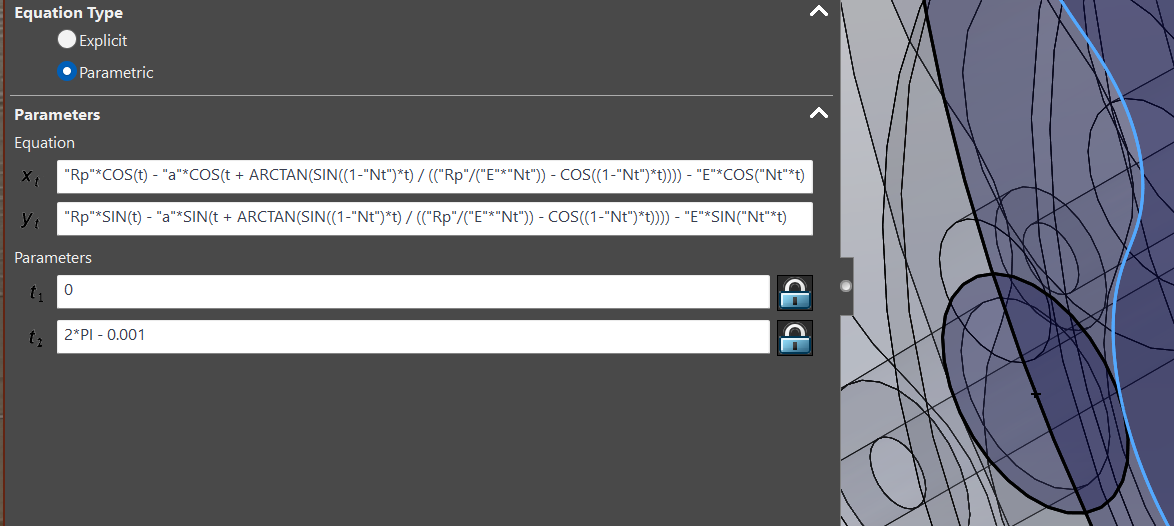
As seen below this has been fully parameterised for any future iterations and to allow for easy modification of the design. The whole solidworks assembly is based on a template part with the parameters and cycloidal equations defined within. \[x(\theta) = R_p \cos(\theta) - a \cos\left(\theta + \arctan\left(\frac{\sin((1-N_t)\theta)}{\frac{R_p}{E \cdot N_t} - \cos((1-N_t)\theta)}\right)\right) - E \cos(N_t \theta)\] \[y(\theta) = R_p \sin(\theta) - a \sin\left(\theta + \arctan\left(\frac{\sin((1-N_t)\theta)}{\frac{R_p}{E \cdot N_t} - \cos((1-N_t)\theta)}\right)\right) - E \sin(N_t \theta)\]
The first iteration was printed in resin to have very high resolution but warped unexpectedly. Future iterations of the first gearbox design will just be done in PLA until improvements from resin printing are justified.